"implicit neural representation" ←
which mainly means, calculate: position + code -> color.
After preliminary experiments, running this setup:
DalleManifoldAutoencoder(
shape=(1, 32, 32),
vocab_size=128, n_hid=64, n_blk_per_group=1, act_fn=nn.GELU, space_to_depth=True,
decoder_n_blk=4, decoder_n_layer=2, decoder_n_hid=64,
)
encoder params: 1,725,264
decoder params: 42,497
batch_size: 64
steps: 1M
learnrate: .0003 AdamW, CosineAnnealingLR
on only 300 (randomly h&v-flipped) images of the RPG-tiles dataset (/scripts/datasets.py).
Find the code at scripts.train_autoencoder.
The encoder is a small version of the DALL-E VQ-VAE model. The decoder is basically a function of
encoding, pixel-position -> pixel-color
which i call "manifold" for now until i stumble across a better name. It's made of X equal blocks of Y fully connected layers with batch-normalization and residual skip connections per block.
Besides l2 reconstruction loss there is an extra constraint on the distribution of the encoding:
loss_batch_std = (.5 - feature_batch.std(0).mean()).abs() loss_batch_mean = (0. - feature_batch.mean()).abs()
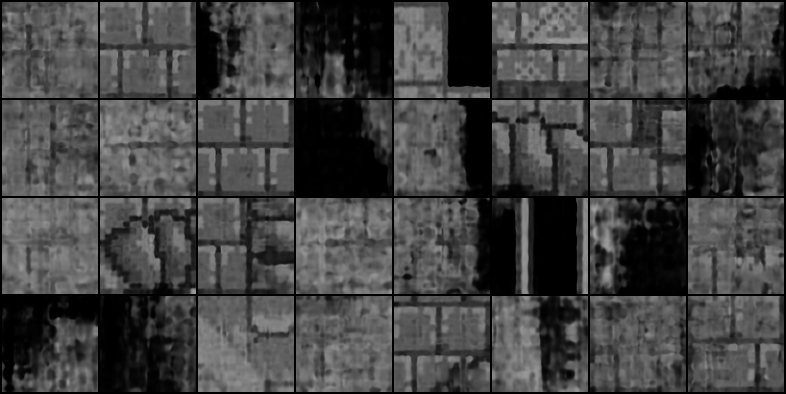
The three runs add these losses with factor 0.1 (green), 0.001 (orange) and 0.0 (gray).
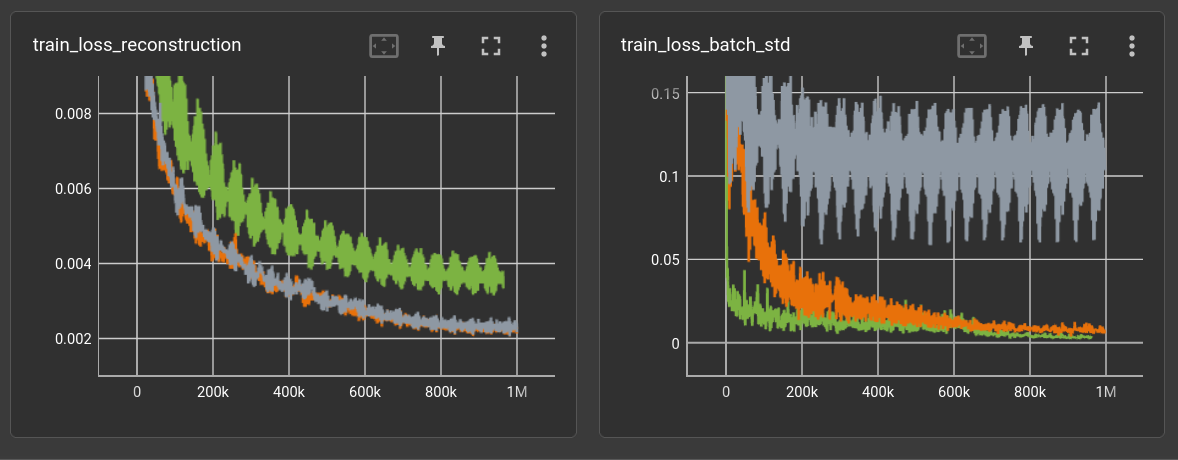
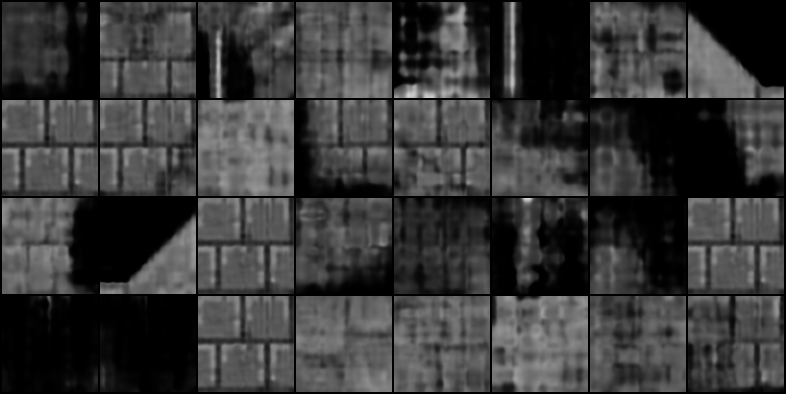
Below are reproduced (right) samples of the orange model.

and rendered to 64x64 resolution:
upgrade decoder ←
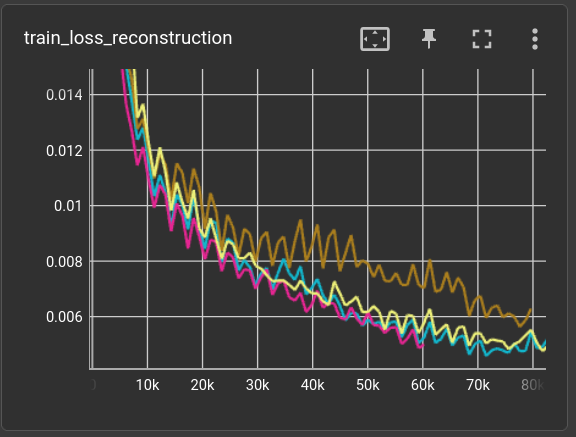
fixed the std/mean loss factor to 0.0001 and increased number of decoder blocks:
decoder_n_blk=8, decoder_n_layer=2, decoder_n_hid=128, params: 283,649
plots in x = steps (top) and relative time (bottom):
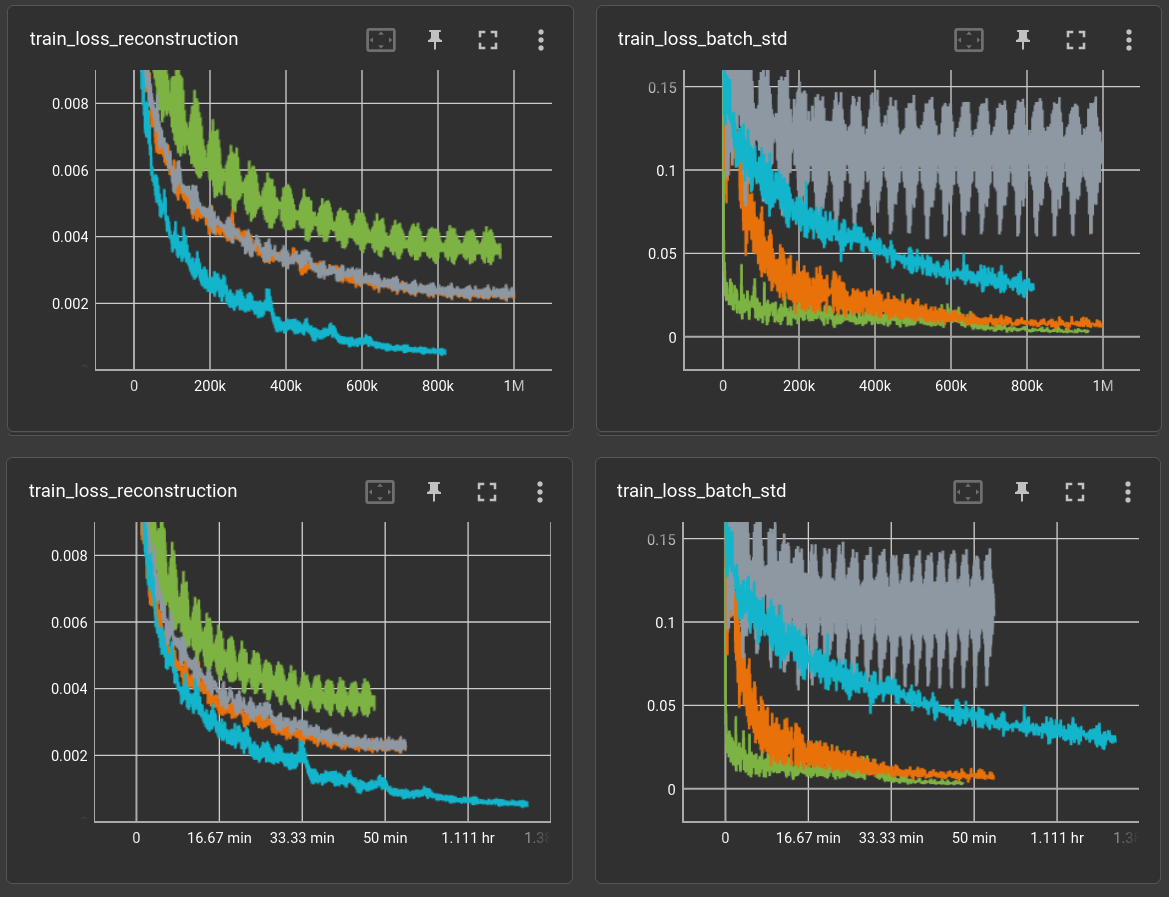
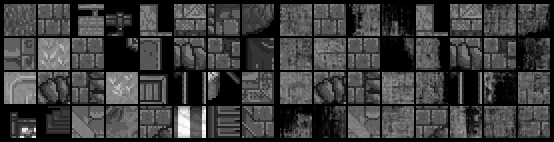
The reproductions from the training set look good enough. other tiles can hardly be reproduced:
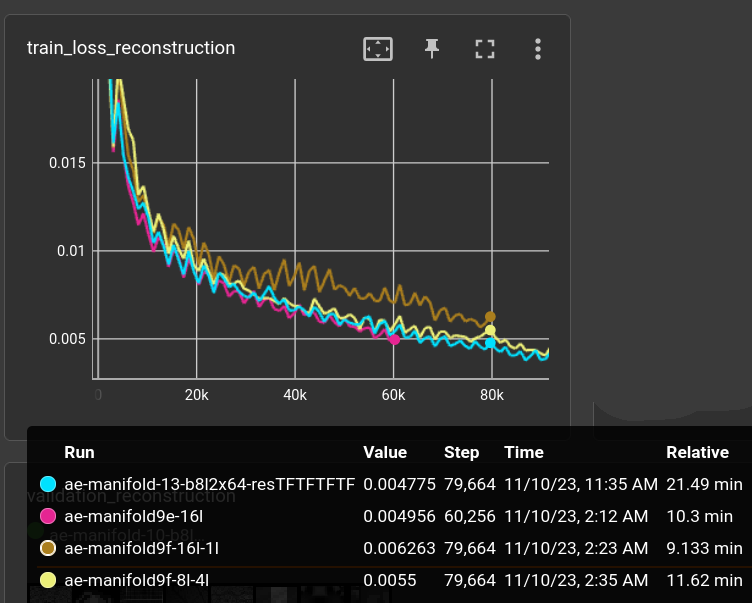
Some (very short) tests with different block/layer settings:
(cyan) decoder_n_blk=8, decoder_n_layer=2, decoder_n_hid=128, params: 283,649 (yellow) decoder_n_blk=8, decoder_n_layer=4, decoder_n_hid=128, params: 547,841 (brown) decoder_n_blk=16, decoder_n_layer=1, decoder_n_hid=128, params: 285,697 (magenta) decoder_n_blk=16, decoder_n_layer=2, decoder_n_hid=128, params: 549,889
back to "real" dataset ←
The current dataset of choice for my autoencoders is a mixture of all the rpg tiles (about 8k, h&v-flipped) and kali-set fractal patches (about 50k, at 128x128 randomly cropped to 32x32).
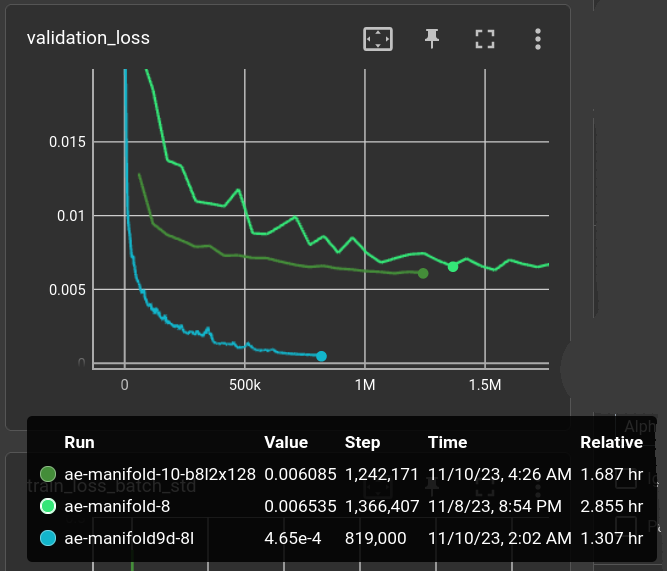
(light green) decoder_n_blk=8, decoder_n_layer=2, decoder_n_hid=300, params: 1,490,401 (dark green) decoder_n_blk=8, decoder_n_layer=2, decoder_n_hid=128, params: 283,649 (cyan) sames as dark green but on above small dataset
The light-green model above was quite unsuccessful in terms of image quality. It still uses 0.1 factor for std/mean-loss. Dark green model uses factor 0.0001 and performs a little better even though having less parameters. It's not getting close to the desirable baseline of the 300-tile dataset (cyan), though.
Increasing the number of hidden cells in the decoder to 256 does not seem to be enough for acceptable quality:
(yellow) decoder_n_blk=8, decoder_n_layer=2, decoder_n_hid=256, params: 1,091,585
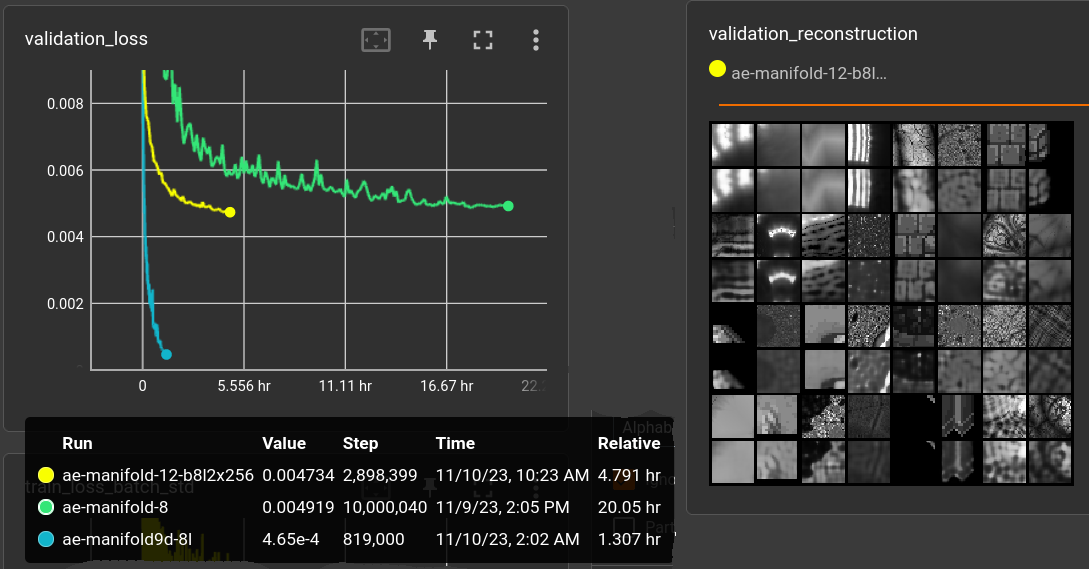
It might get below 0.004 reconstruction loss with another 10 hours but i'm targeting < 0.001. Stopping it.
2023-11-10: back to small dataset ←
Changing residual logic to either add (like previous) or concat features:
decoder_n_blk=8, decoder_n_layer=2, decoder_n_hid=64,
decoder_concat_residual=[True, False] * 4,
params: 3,502,785
which leads to hidden sizes per block:
64, 128, 128, 256, 256, 512, 512, 1024
With no apparent difference within the first 80k steps (cyan) compared to the previous small-dataset-experiments. Unless it's runtime, which is just terrible:
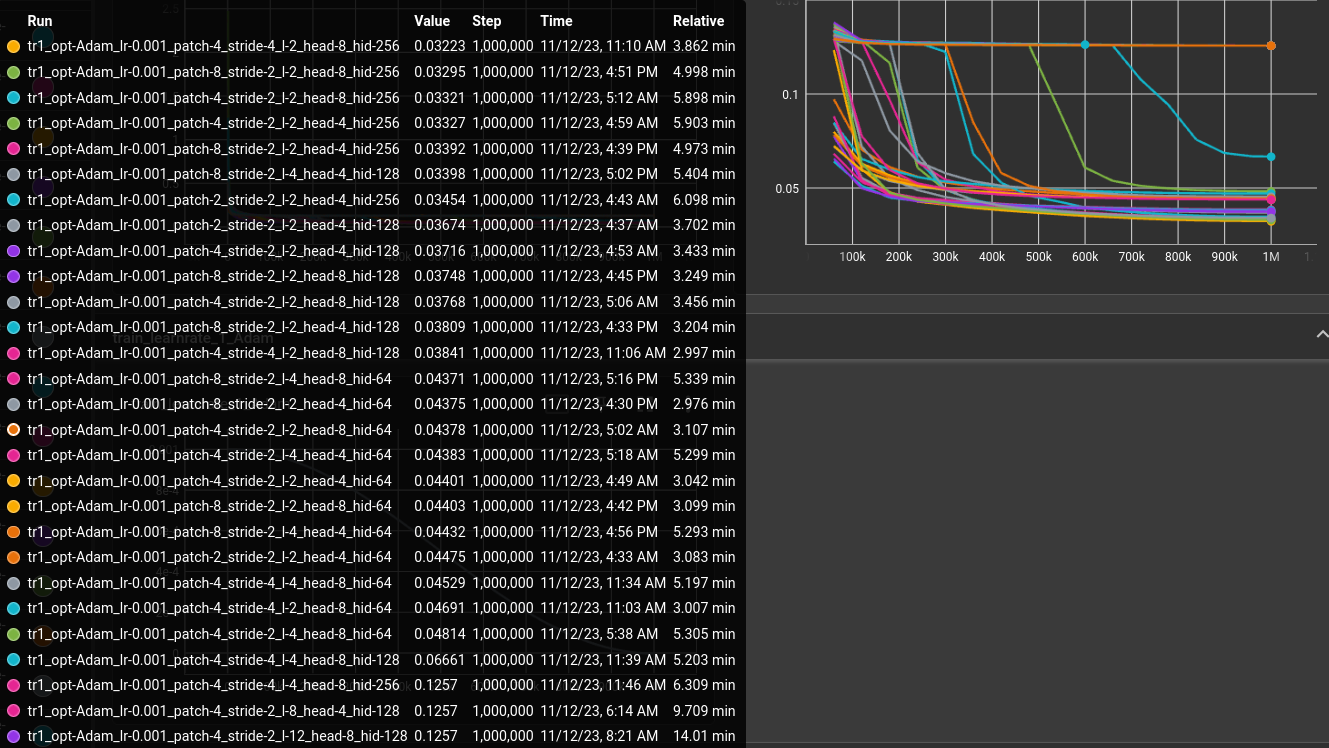
2023-11-12: transformer on mnist ←
clamped torch's TransformerEncoder/Decoder between a conv layer for image patches and tried a couple of parameters:
matrix:
opt: ["Adam"]
lr: [0.001]
patch: [4, 8]
stride: [2, 4, 8]
$filter: ${stride} <= ${patch}
l: [2, 4, 8, 12, 16]
head: [4, 8]
hid: [64, 128, 256]
experiment_name: mnist/tr1_${matrix_slug}
trainer: TrainAutoencoder
globals:
SHAPE: (1, 28, 28)
CODE_SIZE: 28 * 28 // 10
train_set: |
TransformDataset(
TensorDataset(torchvision.datasets.MNIST("~/prog/data/datasets/", train=True).data),
transforms=[lambda x: x.unsqueeze(0).float() / 255.],
)
validation_set: |
TransformDataset(
TensorDataset(torchvision.datasets.MNIST("~/prog/data/datasets/", train=False).data),
transforms=[lambda x: x.unsqueeze(0).float() / 255.],
)
batch_size: 64
learnrate: ${lr}
optimizer: ${opt}
scheduler: CosineAnnealingLR
loss_function: l1
max_inputs: 1_000_000
model: |
from experiments.ae.transformer import *
TransformerAutoencoder(
shape=SHAPE, code_size=CODE_SIZE,
patch_size=${patch},
stride=${stride},
num_layers=${l},
num_hidden=${hid},
num_heads=${head},
)
resnet21 for embedding -> ImageManifoldModel ←
Autoencoder with pre-trained resnet21 (without last avgpool).
matrix:
# compression ratio
cr: [10]
opt: ["Adam"]
lr: [0.001]
hid: [256]
# blocks
bl: [2]
# layers per block
lpb: [2]
act: ["gelu"]
experiment_name: tests/rpg_res5_${matrix_slug}
trainer: experiments.ae.trainer.TrainAutoencoderSpecial
globals:
SHAPE: (3, 32, 32)
CODE_SIZE: 32 * 32 // ${cr}
train_set: |
from experiments.datasets import rpg_tile_dataset
rpg_tile_dataset(SHAPE, validation=False, shuffle=True, random_shift=4, random_flip=True)
freeze_validation_set: True
validation_set: |
from experiments.datasets import rpg_tile_dataset
rpg_tile_dataset(SHAPE, validation=True, shuffle=True, limit=500)
batch_size: 64
learnrate: ${lr}
optimizer: ${opt}
scheduler: CosineAnnealingLR
loss_function: l1
max_inputs: 1_000_000
model: |
from src.models.encoder import resnet
encoder = resnet.resnet18_open(weights=torchvision.models.ResNet18_Weights.IMAGENET1K_V1)
with torch.no_grad():
out_shape = encoder(torch.empty(2, *SHAPE)).shape[-3:]
encoder = nn.Sequential(
encoder,
nn.Flatten(1),
nn.Linear(math.prod(out_shape), CODE_SIZE)
)
#for p in encoder.parameters():
# p.requires_grad = False
EncoderDecoder(
encoder,
ImageManifoldDecoder(
num_input_channels=CODE_SIZE,
num_output_channels=SHAPE[0],
default_shape=SHAPE[-2:],
num_hidden=${hid},
num_blocks=${bl},
num_layers_per_block=${lpb},
activation="${act}",
)
)
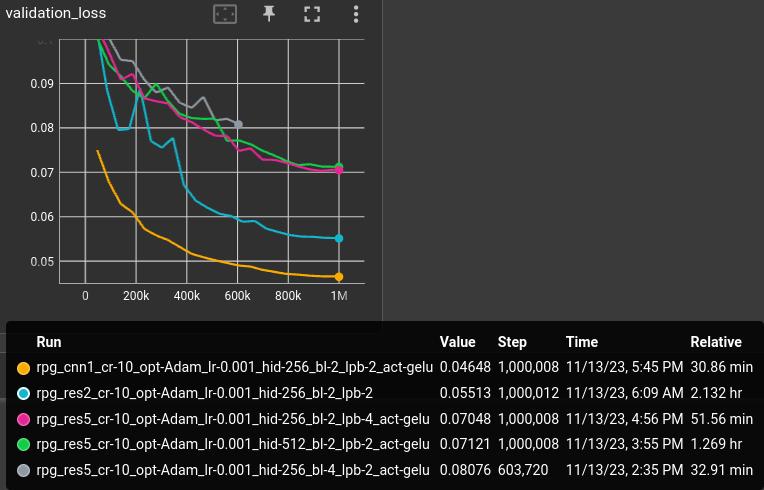
Increasing the number of hidden cells, blocks and layers per block did not provide a benefit on the 7k rpg tile dataset. All larger versions performed worse:
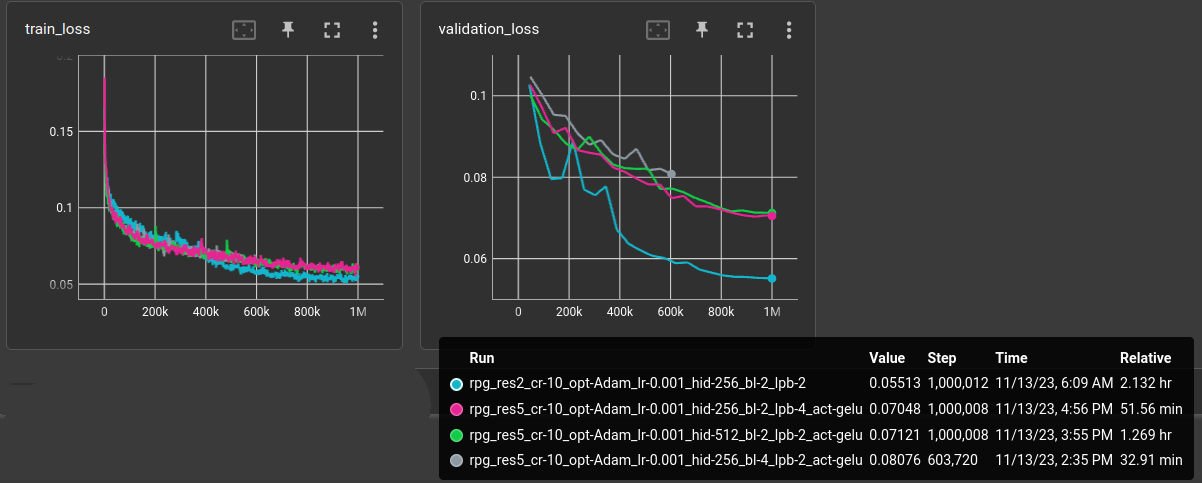
And, actually, it turns out that a simple 3-layer CNN (ks=3, channels=[16, 24, 32]) as the encoder performs much better than the resnet:
(encoder): EncoderConv2d(
(convolution): Conv2dBlock(
(_act_fn): ReLU()
(layers): Sequential(
(0): Conv2d(3, 16, kernel_size=(3, 3), stride=(1, 1))
(1): ReLU()
(2): Conv2d(16, 24, kernel_size=(3, 3), stride=(1, 1))
(3): ReLU()
(4): Conv2d(24, 32, kernel_size=(3, 3), stride=(1, 1))
(5): ReLU()
)
)
(linear): Linear(in_features=21632, out_features=102, bias=True)
)
back to simple CNN encoder ←
Everything i tried in the last couple of days is performing worse, e.g. changing the pos-embedding frequencies, using FFTs in some way and increasing the encoder params.
By the way, running the tests for 1M steps (about 20 epochs with the current RPG tile dataset) might not be enough either... but i'm actually looking for methods that enhance performance already before 1M steps. For the sake of logging:
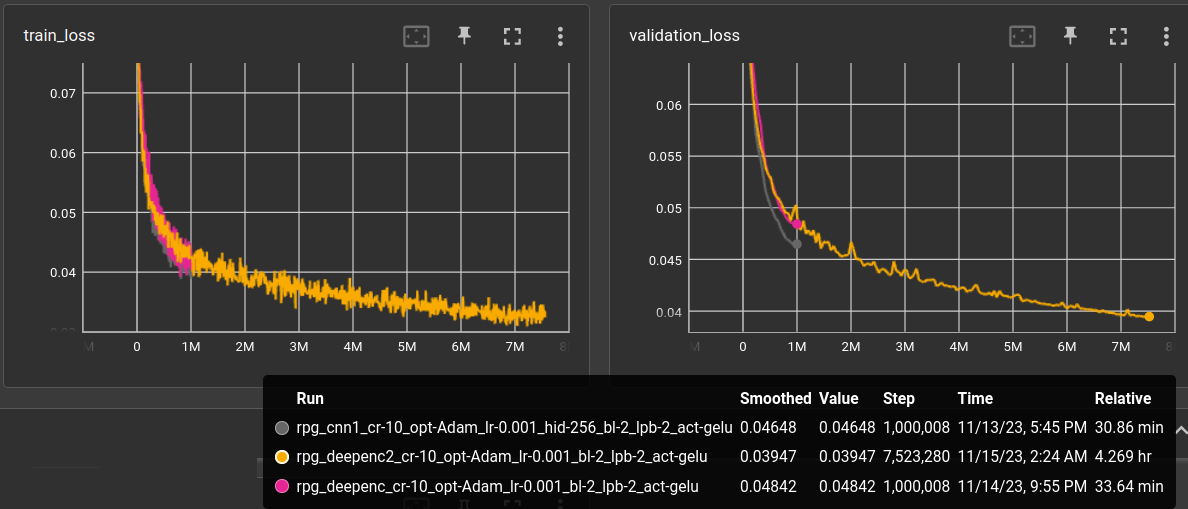
The gray line is the reference with simple CNN encoder from
above and yellow has increased the encoder channels from
(16, 24, 32) to (24, 32, 48) which, of course!, performed
a little worse than the smaller encoder (:questionmark:).
Let it run for 7M steps, which is over 200 epochs
(on a randomly flipped and pixel-shifted dataset).
It went below 0.04 l1 validation loss, but this is still bad:
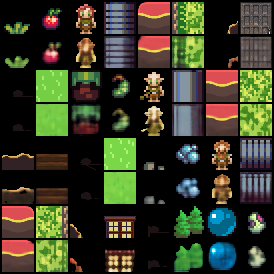
The idea behind using the implicit generation is to be able to increase the resolution, but if it already looks blurry in the original resolution...